





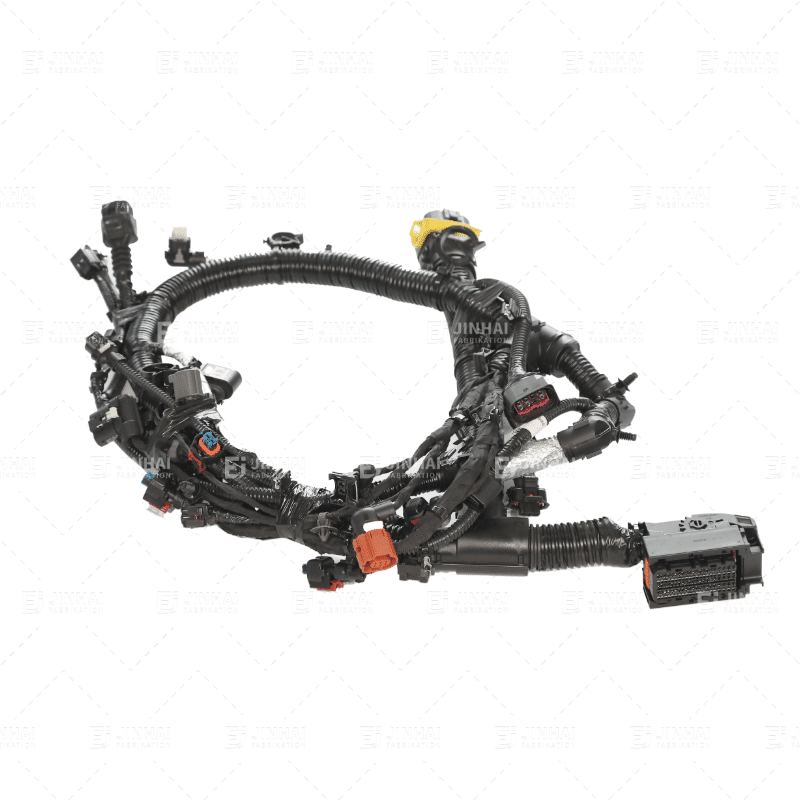










Standar Komunikasi Memanfaatkan Kabel Mesin Otomotif
Standar komunikasi Wiring Harness Mesin Otomotif terutama mencakup dua protokol: CAN (Controller Area Network) dan LIN (Jaringan Interkoneksi Lokal).
| Pkinerja | LIN | BISA |
| Akses Sedang Kontrol | Master Tunggal | Beberapa Master |
| Kecepatan Bus Khas | 2,4 hingga 19,6 kbd | 62,5 hingga 500 kbd |
| Pesan Multicast Perutean | Pengenal ldentifier 6-bit | Pengidentifikasi ldentifier 11/29-bit |
| Jumlah Khas Simpul | 2 hingga 10 Node | 4 hingga 20 Node |
| Pengkodean | NRZ 8N1 (USART) | NRZ dengan Isian Bit |
| Byte Data per Frame | 2,4,8 Byte | 0 hingga 8 Byte |
| Waktu Transmisi untuk 4 Byte Data | 3,5 ms pada 20 kbd | 0.0,8 ms pada 125 kbd |
| Deteksi Kesalahan | Checksum 8-bit | CRC 15-bit |
| Lapisan Fisik | Kawat Tunggal, Vbat | Twisted Pair, 5V |
| Pembuatan Jam | Guru:Kristal,Budak: RC / Resonatatau | Kristal |
| Biaya Relatif per Node | 0.5 | 1 |
CAN dan LIN cocok untuk berbagai skenario dalam komunikasi harness kabel kompartemen mesin. CAN digunakan untuk sistem kontrol mesin utama berkecepatan tinggi dan keandalan tinggi, sedangkan LIN digunakan untuk sistem tambahan modul dengan persyaratan waktu nyata yang rendah, seperti kontrol bodi (seperti jendela dan wiper).
Hubungi kami segera untuk mengetahui bagaimana kami dapat memenuhi kebutuhan kabel dan harness Anda. Ikuti kami di Youtube .






